TERMOSTATO DIGITAL CON PANTALLA LCD
FASE 3: Manejo del Timer y las interrupciones
1. COMPETENCIAS ESPECIFICAS
- Conocer el funcionamiento y la configuración de las interrupciones.
- Conocer el funcionamiento y la configuración del Timer cero.
- Aplicar estos conocimientos en la realización de un cronometro.
2. MARCO TEÓRICO
INTERRUPCIONES EN UN PIC
Son señales recibidas por el sistema de un PIC para decirle que debe interrumpir la ejecución actual y pasar a tratar un código o señal especifica para tratar esta situación
Interrupciones del pic 16F876A
- El PIC 16F876A tiene un único vector de interrupción y todas las interrupciones que ocurran provocan un salto que se dirija ese vector, para este suceso la rutina de manejo de la interrupción debe reconocer que evento o efecto interrumpió el programa para ejecutar la rutina correcta.
- Al finalizar la rutina del ciclo de interrupción (RETFIE) el programa retorna al punto donde fue interrumpido
- Las interrupciones permiten la interrupción del programa a cualquier suceso ya sea de tipo interno o externa, la interrupción que se da en el PIC salta a la dirección del vector (0004h) de interrupción y ejecuta el ciclo
- El PIC posee registros con flags de interrupción los cuales les permiten identificar el evento.
Para la interrupciones que se puedan dar en el PIC 16F876A existen tres tipos de registros de interupcion:
- Registros de interrupción numero 4

- Registros de interrupción numero 5

- Registros de interrupción numero 6

En los CCS tambien se dan interrupciones, pero de la siguiente manera:
- Interrupciones en CCS CCS dispone de directivas para el manejo de interrupciones por ejemplo: #int_XXXX. La directiva especifica que la función que la sigue es la función de interrupción correspondiente

Sus funciones CCS 8 se ven validadas en una pantalla, donde se ven reflejados los diferentes tipos de conectores ( valores de recepción del PIC 16F876A)

En el CCS vemos algunas funciones anexadas para la interrupción:
Para facilitar el manejo de interrupciones en C, el compilador incluye funciones
- enable_interrupts(level) Activa las interrupciones indicadas por level.
- disable_interrupts(level) desactiva las interrupciones indicadas por level.
- clear_interrupts(level) Borra el flag de interrupción indicado
Partiendo de estas especificacions obtenemos un variable que debemos reconocer el LEVEL
- Level es una constante definida en el fichero de cabecera (#include) generando el código necesario para activar las interrupciones correspondientes modificando los registros ITCON, PIE1 y PIE2. Debemos activa el “global mente” cuando se activamos alguna interrupción
Definiciones de cada registro de level

´Para estos registros se muestra un ejemplo general del código de registro

TEMPORIZADOR
En este caso los temporizadores etarana referidos en base al PIC 16F876A:
El PIC 16F876A dispone de tres temporizadores/contadores:
- Timer 0: 8 bits.
- Timer 1: 16 bits.
- Timer 2: 16 bits.
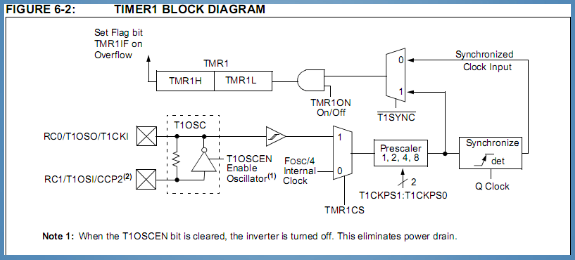
Pueden funcionar como contadores de flancos externos o como temporizador (contador de ciclos máquina)y disponen de “prescaler” para ampliar el tamaño de la cuenta (hasta x256), ademas un temporizador posee una cuenta de 16 bits en dos registros de 8 bits:
- TMR1H (parte alta)
- TMR1L (parte baja)
Podemos leer y escribir los registros de cuenta, tambien surge un interrupción por desbordamiento de FFFFh a 0000h. Controlado por el registro T1CON.
Funcionamiento como:
- Temporizador (incrementa cada ciclo máquina).
- Contador síncrono.
- Contador asíncrono
Aqui podemos observar el diagrama de bloques del timer
El registro de control del timer es el siguiente:

El timmer en C proporciona diversas funciones de configuración de los temporizadores el set up, el get , el set se veran cada uno de ellos a continuacion:
- setup_timer_X (modo) Programa el modo de funcionamiento del timer X
- get_timerX () Lee el valor de la cuenta.
- set_timerX (valor) Escribe “valor” en los registros de cuenta.
3. EVIDENCIAS DENTRO DE LABORATORIO
1. Probar y simular en el entrenador el programa mostrado de acuerdo al circuito y código siguiente. Asegurandonos que el LCD esté conectado al PUERTO D mediante interruptores rojos debajo del mismo:
#include <16f877a.h> // Incluimos archivo con PIC a utilizar
#device adc=8 // Utilizamos 8 bits de RESOLUCION de lectura
#use delay (clock=20M) // Indicamos al compilador que trabajaremos a 20Mhz
#fuses HS, NOPROTECT, NOWDT // Configuración básica de los fusibles
#define LCD_ENABLE_PIN PIN_D3 //Definimos los pines a ser utilizados por la
#define LCD_RS_PIN PIN_D2 //pantalla LCD
#define LCD_RW_PIN PIN_C7
#define LCD_DATA4 PIN_D4
#define LCD_DATA5 PIN_D5
#define LCD_DATA6 PIN_D6
#define LCD_DATA7 PIN_D7
#include <lcd.c> // Incluimos librería para manejar Pantalla LCD
int centesimas=0,segundos=0,minutos=2;
#int_TIMER0 // FUNCION DE INTERRUPCION POR
void TIMER(VOID) // DESBORDAMIENTO DEL TIMER 0
{
++centesimas; // incrementar una centésima
if (centesimas>99)
{
++segundos; // si llegamos a 100, incrementar un segundo
centesimas=0;
}
if (segundos>59)
LABORATORIO MICROCONTROLADORES
Nro.
Página 4 de 4
{
++minutos; // si llegamos a 60, incrementar un minuto
segundos=0;
}
if (minutos==3) // si llegamos a 3 minutos, hacer alguna acción
{
minutos=0;
disable_interrupts (INT_TIMER0); //habilita interrupcion de timer0
// agregar cualquier otra acción necesaria.
}
set_timer0 (61); //reinicar cuenta desde 61
}
void main ()
{
lcd_init () ; // Inicializamos pantalla LCD
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_256); //configuracion del timer0
set_timer0 (61); // interrupción cada centésima
enable_interrupts (INT_TIMER0); //habilita interrupcion de timer0
enable_interrupts (GLOBAL); //todas las interrupciones activadas
printf (lcd_putc, "\f***CRONOMETRO***") ; // Mandamos mensaje por única vez
WHILE (true)
{
lcd_gotoxy(2,2);
Printf(lcd_putc,"Tiempo %02u:%02u",minutos, segundos);
}
}
2. A partir del código mostrado, realice los cambios necesarios para realizar un programa que CUENTE EN FORMA DESCENDENTE, (temporizador regresivo), bajo las siguientes condiciones:
a. Al presionar pulsador en A5, incrementar MINUTOS. el temporizador aún no debe estar contando el tiempo. (sirve para configurar tiempo de cuenta).
b. Al presionar pulsador en D0, iniciar CUENTA REGRESIVA desde los minutos previamente configurados.
c. Si la cuenta llega a 00:00, congelar la cuenta y sonar BIP 3 veces.
3. Para verificar que una variable de tiempo (digamos “minutos”) llegó a cero, hacerlo con la instrucción “if (minutos==-1)”
EVIDENCIA REALIZADA :
Programación realizado en CCS COMPILER:
#include <16f877a.h> // Incluimos archivo con PIC a utilizar
#use delay (clock=20M) // Indicamos al compilador que trabajaremos a 20Mhz
#fuses HS, NOPROTECT, NOWDT // Configuración básica de los fusibles
#define LCD_ENABLE_PIN PIN_D3 //Definimos los pines a ser utilizados por la
#define LCD_RS_PIN PIN_D2 //pantalla LCD
#define LCD_RW_PIN PIN_A0
#define LCD_DATA4 PIN_D4
#define LCD_DATA5 PIN_D5
#define LCD_DATA6 PIN_D6
#define LCD_DATA7 PIN_D7
#include <lcd.c> // Incluimos librería para manejar Pantalla LCD
int centesimas=0,segundos=0,minutos=0;
INT encendido=0;
void BIP();
#int_TIMER0 // FUNCION DE INTERRUPCION POR
void TIMER(VOID) // DESBORDAMIENTO DEL TIMER 0
{
++centesimas; // incrementar una centésima
if (centesimas>99)
{
--segundos; // si llegamos a 100, incrementar un segundo
centesimas=0;
}
if (segundos==-1)
{
--minutos; // si llegamos a 60, incrementar un minuto
segundos=59;
}
if (minutos==-1) // si llegamos a 3 minutos, hacer alguna acción
{
minutos=0;
disable_interrupts (INT_TIMER0); //habilita interrupcion de timer0
// agregar cualquier otra acción necesaria.
}
set_timer0 (61); //reinicar cuenta desde 61
}
void main ()
{
lcd_init () ; // Inicializamos pantalla LCD
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_256); //configuracion del timer0
set_timer0 (61); // interrupción cada centésima
enable_interrupts (INT_TIMER0); //habilita interrupcion de timer0
enable_interrupts (GLOBAL); //todas las interrupciones activadas
printf (lcd_putc, "\f***Temporizador***") ; // Mandamos mensaje por única vez
WHILE (true)
{
lcd_gotoxy(2,2);
Printf(lcd_putc,"Tiempo %02u:%02u",minutos, segundos);
IF(!input(PIN_A5)) // AUMENTA 1 MIN
{
minutos = minutos + 1;
delay_ms(500);
}
IF(!input(PIN_E2))
{
disable_interrupts (INT_TIMER0); //CUENTA REGRESIVA DESACTIVADOR
delay_ms(500);
}
IF(!input(PIN_D0)) //CUENTA REGRESIVA
{
enable_interrupts (INT_TIMER0);
encendido =1;
}
IF (minutos==0 && segundos==0 && encendido==1)
{
delay_ms(100);
BIP();
delay_ms(500);
BIP();
delay_ms(500);
BIP();
delay_ms(500);
minutos=0;
segundos=0;
encendido =0;
}
}
}
void BIP()
{
int i; // Declaración de VARIABLE LOCAL
FOR (i=0;i<=50;++i)
{
output_high(PIN_E1); // Pone a "1" el pin E1 (envía 5 voltios)
delay_ms(1); // "Congela el tiempo" durante 1ms
output_low(PIN_E1); // Pone a "0" el pin E1
delay_ms(1); // "Congela el tiempo" durante 1ms
}
}
4. OBSERVACIONES
· Para generar los segundos, minutos y centésimas, debemos usar 3 variables de tipo entero
· Si queremos saber el tiempo de un segundo real debemos usar el timer 0 el cual es de 8 bits
· Si queremos parar el cronómetro, usamos la sentencia: “disable_interrups” y el pulsador en el pin A5 el cual también aumenta los minutos y para iniciarlo de nuevo: “enable_interrups” y el pulsador en el pin D0.
5. CONCLUSIONES
· Hemos creado una función que hemos llamado BIP para emitir 3 pitidos una vez el temporizador llegue a 0.
Creamos una variable que llamada encendido la cual con una función AND se activa con los minutos y segundos en cero, para que cuando iniciemos el contador os bips no produzcan sonido
· Para el caso de realizar un cronómetro con cuenta hacia atrás. Fue necesario asignar a la variable segundos 59 y terminarla en -1, igualmente con minutos.
· Aprendimos el uso correcto de las interrupciones para programas un temporizador
No hay comentarios:
Publicar un comentario